カッティングプロッターでクリアファイルの指を作って牛乳パックの腕につけて物をつかんでみた
またマジックハンドを作っています。
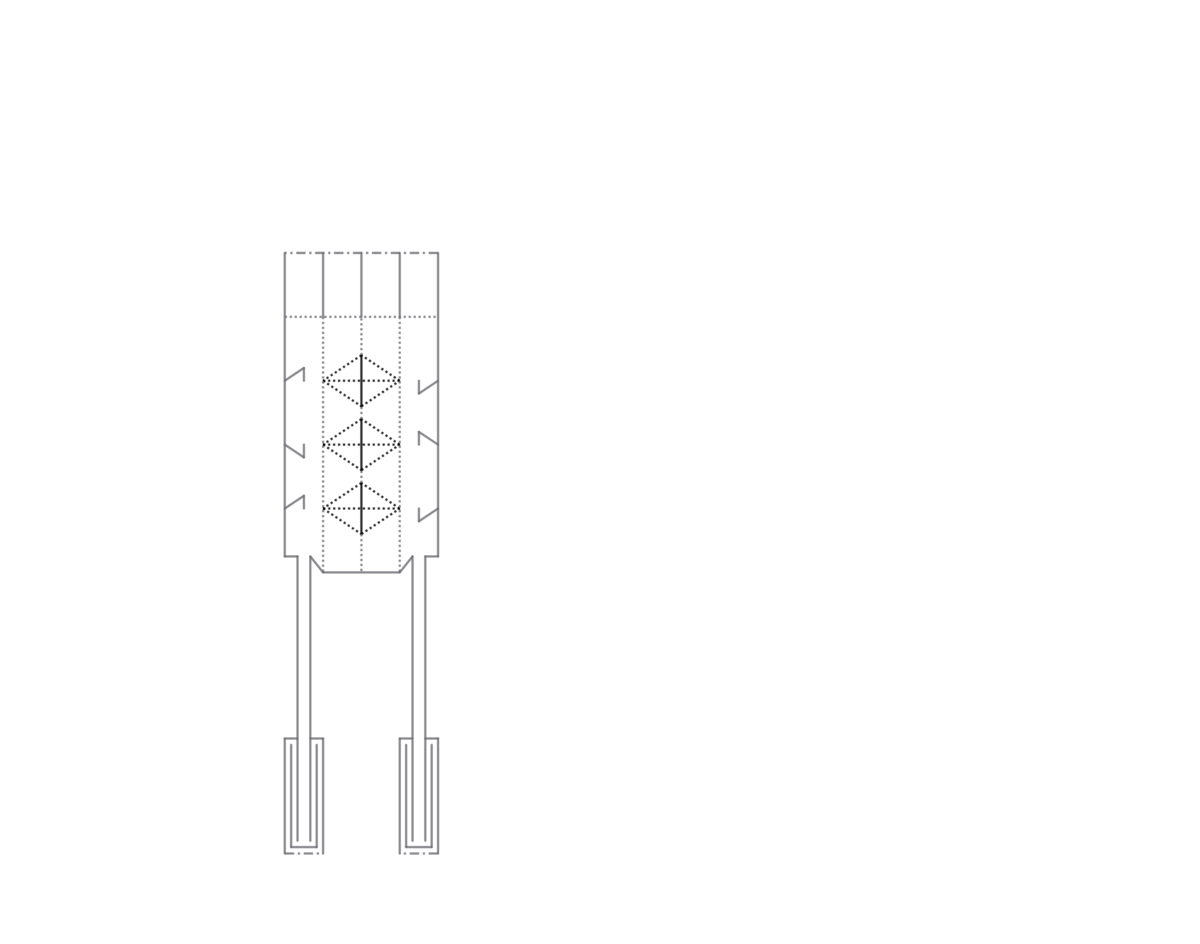
まずはGeoGebraで設計図を書きます。カッティングプロッターに渡す、クリアファイルをカットする情報ですね。
点線が折れ線で、実践はカットする線です。上下の線が点線になっているのは、カットするときに外れてしまうとズレちゃうことがあるので、つないでおくためのちょっとした工夫です。
カットする線の画像
カットする線のGeoGebraの埋め込み
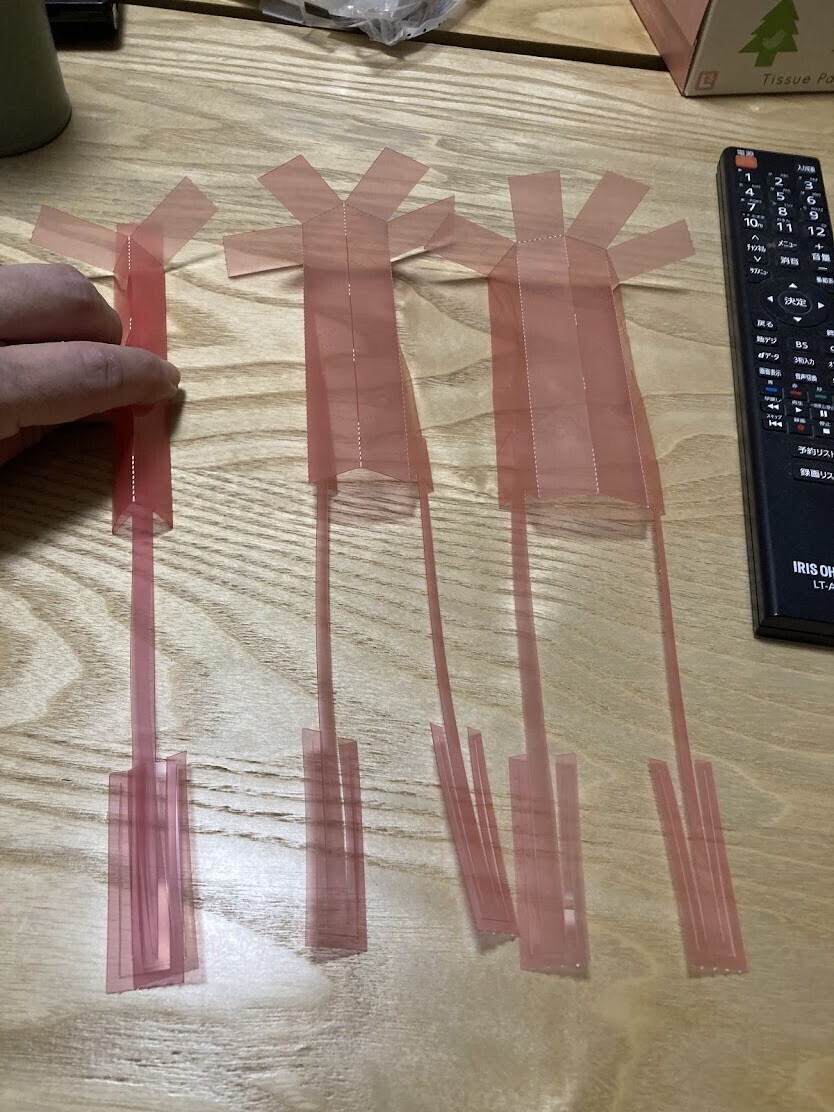
クリアファイルをカットして、外したところ

組み立て途中
指の出来上がり

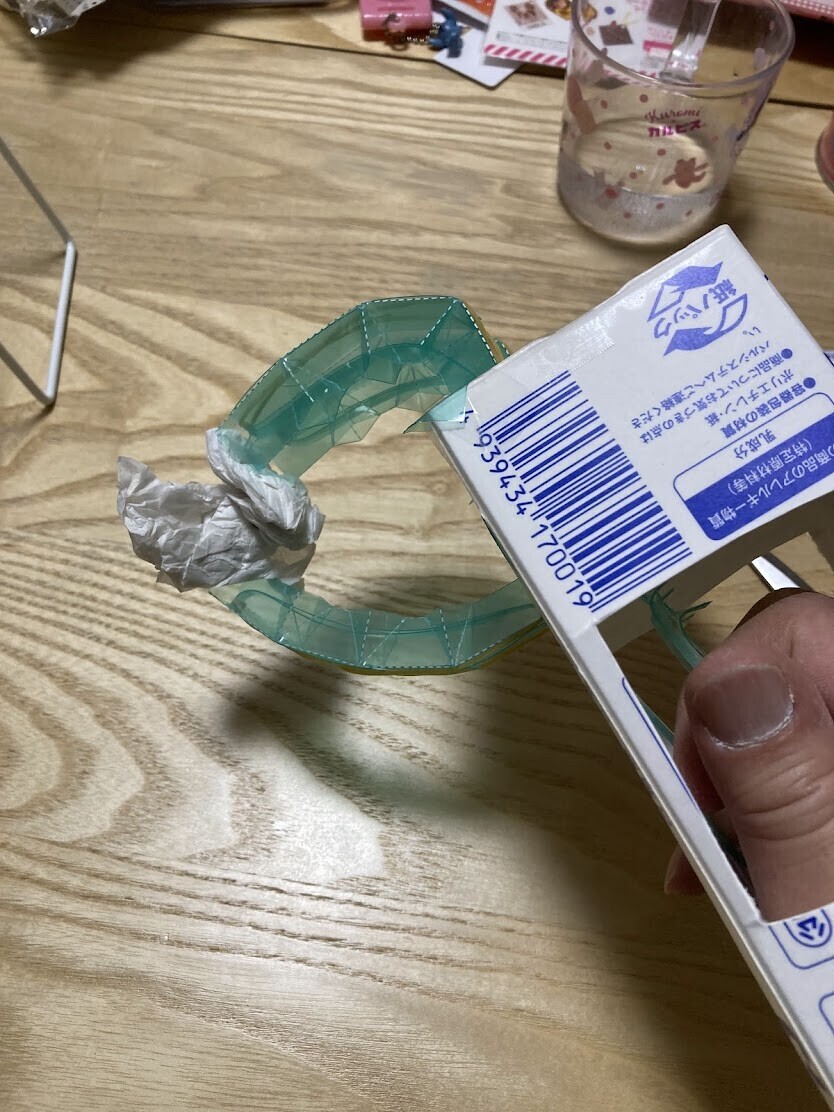
牛乳パックの腕にくっつけました

内側から操作して、ものをつかめます
動画も付けておきます
カッティングプロッターでクリアファイルをカットして作った指を、牛乳パックにくっつけて、内側から操作できるようにした。
— Akiya Mizukoshi (@Akiyah) April 22, 2026
モノをつかめるようになった。 pic.twitter.com/h5q9nUFKEv
牛乳パックで作るマジックハンド(指の部分メイン)
マジックハンドを作りたくなったので、家にたくさんある牛乳パックで試行錯誤しています。いったんは指に関してはちょっとうまくできたので、ここに作り方を書いておきます。
まずは牛乳パックを準備します。洗って乾かしておきます。

切って開きます。


青い線はカッターで切って、赤い線はカッターで線を入れます。
線は説明のために書いたもので、自分で作るときには基準となる点だけをつけています。

切ったところ。牛乳パック1つで指は2本です。

折り曲げます。

後ろは切れ目を交互に差し込んで、固定します。


中に紐を通して、指の第一関節部分で結びます。


紐を引っ張ると指が曲がって、紐を緩めるともとに戻ります。

指を4本作って、牛乳パックにくっつけて、ハンドにしてみました。


閉じることができる。


ハンドは、まだ操作感も良くないし、改善予定です。
今見ると指が太さに対して長すぎるかも?
片手で操作できるようにして、両手ともマジックハンドをやりたいと思っています。
1ヶ月のお休みとpaiza株式会社へ転職とpaizaの問題を解くときの準備
この投稿は paiza Advent Calendar 2023 の1日目の記事です!
近況報告みたいなものを書きますね。
10月
さて、10月は転職前の有給休暇を使って1ヶ月間を仕事しないで過ごしました。
 (11月に前職でLTに招待してもらったのでその時にJamboardで書いたものです。辞めた人を呼んでくれるなんて懐が広い会社です。)
(11月に前職でLTに招待してもらったのでその時にJamboardで書いたものです。辞めた人を呼んでくれるなんて懐が広い会社です。)
10月の前半はMaker Faire Tokyo 2023の準備で、後半は統計検定1級の勉強がメインでした。
この期間に買ってよかったものが二つあります。
まずはASUSのChromebookです。

会社のPCは返しちゃうので、10月を1ヶ月間乗りきるつもりで買いました。 安くて小さいけど解像度は高くて、Maker Faireの作品の設計に役に立ってくれました。あと転職のための事務作業にも。 散歩するときにカバンに入れておいて、途中で入ったスタバで作業できて便利でした。
もう一つは、Amazfit Band 7というスマートバンドです。
")
「アジャイル式」健康カイゼンガイドの読書会で教えてもらいました。 スマートウォッチは欲しいけど高くて買えないと思っていましたが、7000円くらいで購入できて、歩数と心拍数が計測できて、私にとっては十分なものでした。 これのおかげで散歩して1日8000歩を歩くのが楽しくなりました。
11月
11月になってpaiza株式会社へ転職しました。 ここ何年かリモートワークしていたし、10月は仕事をしていなかったので、いきなり出社して仕事をするのは大変でした。 11月の1日2日と働いたら3,4,5と休日だったのでなんとか乗り切れましたが、もしも月曜日スタートで5日間連続で働いていたら無理だったかも。 2週目の途中からリモートワークにして、落ち着いてきました。 仕事に慣れるために頑張っています。
オフィスは外苑前なのですが、じつは前々職(2017年〜2019年)も外苑前でした。 2019年以来だったのでオリンピックを挟んで、いろいろ様子が変わっていました。
paizaの問題を解くときの準備(案)
ここまでの流れと関係ないのですが、paizaのスキルチェックなどの問題を解くときに、こんなふうにするのがいいかなと思ったことがあったのでメモしておきます。(まだpaizaに入社する前に考えたことです)
paizaではブラウザで動かす実行環境があるので、自分で実行環境を準備する必要は無いのですが、入力をいろいろ変えて試したいことがあります。難しい問題の時は特に。そういう時は自分のPCに下記のようなファイルを用意して、簡単に試せるようにしておきます。例として入力を10倍して出力するというコードを考えてみます。
run.sh
ruby main.rb < input/input1.txt > actual/actual1.txt ruby main.rb < input/input2.txt > actual/actual2.txt ruby main.rb < input/input3.txt > actual/actual3.txt diff actual/actual1.txt expected/expected1.txt diff actual/actual2.txt expected/expected2.txt diff actual/actual3.txt expected/expected3.txt
main.rb (提出用のコード)
n = gets.chomp puts n + '0' # 10倍するコードの間違い
input_2.txt (入力のひとつのパターン)
0
expected_2.txt (出力の期待している状態)
0
actual_2.txt (実際に出力されたもの。 00 は期待している値とは違いますね。)
00
実行例 (期待と違っているので差分が表示されています)
% sh run.sh 1c1 < 00 --- > 0

期待通りの動きをした場合は run.sh はなにも出力せず、期待と違う場合は期待と実際との差分を表示します。
input*.txt、expected*.txtを増やした場合は run.sh に行を増やすことを忘れないようにしましょう。
こういう環境を作っておいて、入出力の確認を着実に行うことで、うっかりパターンが漏れていて点数が減ってしまうことを避けられると思います。 (こういうことをやっている人は多い気がします)
おまけの告知
12月2日(土)にアジャイルプロセス協議会のイベントがあるのでよろしくお願いいたします。
ジョイント(かみ合わせ)の研究:丸いT型ジョイント
以前の研究の続きです。
下の画像がMaker Faire Tokyo 2023で出展した 宝石💎 の設計図です。

以前の研究 で書いた「T字のジョイント」に似ていますが、差し込む部分を丸くしているのが改善点です。
以前のもの。

差し込む部分の両端を折って差し込むことで、差し込んだあとに開いて固定されます。その分、差し込むのが難しいです。
今回の改善

差し込む部分が丸くなっていて、差し込みやすくなっています。以前のものと比べると少し固定が甘くて外れやすいですが、逆に、差し込んだあとも外したいときがある場合は使いやすいです。
Maker Faire Tokyo 2023にベランダラボ(D-01-01)で出展しました
Maker Faire Tokyo 2023にベランダラボ(D-01-01)で出展しました。
今回展示したのは、ツル、菱形十二面体、カボチャ🎃、宝石💎、コウモリ🦇、ヘキサフレクサゴンです。それぞれの型をカッティングプロッターでカットしておいて、あとは折れば完成するようなっています。

こんな感じです。

子供たちが組み立てて遊んでいきます。
それぞれ基本は100円で、小さいコウモリ🦇は無料にしました。振ると光るパーツを中に入れた場合は500円にしました(カボチャ🎃と宝石💎の場合)。組み立てるのは無料で、持って帰るときにお金を払ってもらうようにしました。(完成できないときもあって、そういうときにお金をもらうのは申し訳ないので)
作品を表にまとめるとこんな感じ。
| 作品 | 値段 | 販売(配布)数 | 制作難易度 | 備考 |
|---|---|---|---|---|
| ツル | 100円 | ★★★★ | ★★ | おなじみの折り鶴なので説明不要で勧めやすい。折り線はついているけど、折り紙とは手順が違うので作り方は説明する必要があった。(説明すればほとんどの人が完成できた。) |
| 菱形十二面体 | 100円 | ★★ | ★★★ | 完成品は立体だけど元は12個のパーツが入っている一枚のシートで、組み立てるときに間違えることがある。説明が難しい。 |
| カボチャ🎃 | 100円 | ★★ | ★★★★★ | 作るのがメチャムズ。脱落者もたくさん。作り方の説明方法も難しい。 |
| 光るカボチャ🎃 | 500円 | ★★ | ★★★★★ | 作るのは難しいけど、光るパーツを入れた完成品の状態で買ってくれる人がいた。 |
| 宝石💎 | 100円 | ★★★★ | ★★★ | まず折り目をつけちゃえば、最終的な形が見えてくるので迷うことはない。ジョイントを差し込むのが難しい。 |
| 光る宝石💎 | 500円 | ★★★ | ★★★ | 当初は予定していなかった作品。カボチャ🎃用の光るパーツを入れた光る宝石💎。なかなかキレイ。 |
| コウモリ🦇(小) | 0円 | ★★★★★ | ★★ | 無料なのでまずはこれをオススメした。羽根が動くのでアピールしやすい。 |
| コウモリ🦇(大) | 100円 | ★ | ★★ | 無料のコウモリ🦇(小)があるので、大きさだけが違うコウモリ🦇(大)はほとんど売れなかった。 |
| ヘキサフレクサゴン | 100円 | ★★ | ★★ | 奥さんが作っていたヘキサフレクサゴンなので、一人だった初日は全然アピールできなかった。 |
無料のコウモリ🦇(小)と宝石💎とツルが主力でした。自分の作った作品の何が受けが良いのかを知りたかったので、メイカーフェアで反応を見ることができて良かったです!
クリアファイル(PP)で作った宝石💎はキレイだし受けも良かったので、もうちょっと改善して行きたいです。作り方をもっと簡単にするとか。あるいは今回のダイヤモンド型以外の形も用意するとか。
途中で、コウモリ🦇(小)と宝石💎を補充する目的もあって、カッティングプロッターを動かしていたのですが、動いているカッティングプロッターもけっこう人が見ていました。こういうものがあるということを知らなかった、という人も多かったです。私もカッティングプロッターを数年前まで知らなかったし、買う前にどんな道具なのかいまいちわからないまま買って、自分で動かしてやっと理解できました。カッティングプロッターの紹介にも役立つことができたなら良かったです。
楽しかったので、また来年も出展したいです。
Maker Faire Tokyo 2023の作品の組み立て方:カボチャ
カボチャの作り方です。
この状態が最初です。

直線を、同じ方向に折っていきます。

曲線は、直線とは逆に折ります。曲がっているので折りにくいです。

折り目をしっかりと付けておきます。

外から見て直線が山折りになるように筒にして、ジョイントの三角を折ってから差し込みます。



裏から見て、ジョイントの三角を広げて、固定します。


筒の状態になったら、片方を折り込んで閉じます。これが、とっても大変です。なかなかうまく行きません。



できました。この段階で折り目をきれいに直しておきます。

反対側も同じように折り込みます。残りのほうが、ちょっと簡単です。



顔を書いて完成です!

Maker Faire Tokyo 2023の作品の組み立て方:菱形十二面体
菱形十二面体の作り方です。
最初はシートになっています。

12個のパーツをシートから外します。

2つのパーツを、噛み合わせて、

つなぎます。

3つを繋げた状態。

これを繰り返して形にしていきます。裏表を間違えないように。あと、つなげる角を間違えないように。

最後の一個を付けるのが大変です。

完成!
